トピックス
AI規制と倫理的ロボットデザイン ~技術開発スピードと、AI対応技術の規制に対する立法措置の遅さとのミスマッチ解決を目指して~
2024年11月21日書籍出版および2025年1月9日プレスリリース
2025.01.09
九州大学高等研究院の翁岳暄 稲盛フロンティアプログラム・准教授(東北大学学際科学フロンティア研究所(クロスアポイントメント))は、2024年11月にケンブリッジ大学出版局の新書The Cambridge Handbook on the Law, Policy and Regulation for Human-Robot Interactionにて、「Ethical Design and Standardization for Robot Governance」の章を執筆しました。
近年、AIペーシング問題を解決するために、各国や国際機関が標準化アプローチを用いて以下の3つの異なるアプローチを行っています(図参照)。
タイプA(整合規格):AI規制に関する法律をサポートする補足的な技術規範として使用されるアプローチ
タイプB(ソフト・ロー):政策指針や道徳原則を拘束力のない柔軟なルールとして適用されるアプローチ。
タイプC:タイプAとタイプBのハイブリッドアプローチ。AI開発者が責任ある研究とイノベーション(RRI)を実施できるように、重要な倫理的配慮を社会技術的基準に変換することを目的とする。
タイプA(整合規格):AI規制に関する法律をサポートする補足的な技術規範として使用されるアプローチ
タイプB(ソフト・ロー):政策指針や道徳原則を拘束力のない柔軟なルールとして適用されるアプローチ。
タイプC:タイプAとタイプBのハイブリッドアプローチ。AI開発者が責任ある研究とイノベーション(RRI)を実施できるように、重要な倫理的配慮を社会技術的基準に変換することを目的とする。
本章では、技術進歩の急速なスピードに対応できていない立法措置の遅れに起因する、AIペーシング問題について考察しています。重要なAI技術の規制を検討することに加え、人間とロボットの日常的な相互作用に内在する倫理的、法的、社会的影響リスクを利害関係者が確実に管理できるよう、拘束力のない柔軟なAI倫理基準に依拠した規制の枠組みについても論じています。AI倫理基準をヒューマノイドロボットや表現ロボットの開発プロセスに組み込むことで、ロボット開発者は、ロボット規制のために制定された法律に抵触することなく、責任あるイノベーションと研究の原則を盛り込むことができます。本章では、2つのケーススタディを通して、倫理的ロボットデザインのアプローチを探求し、その可能性と限界を検証し、合法的リーガル・ヒューマン・ロボット・インタラクション(L-HRI)の実施におけるコンプライアンス・バイ・デザインの有用性を実証します。
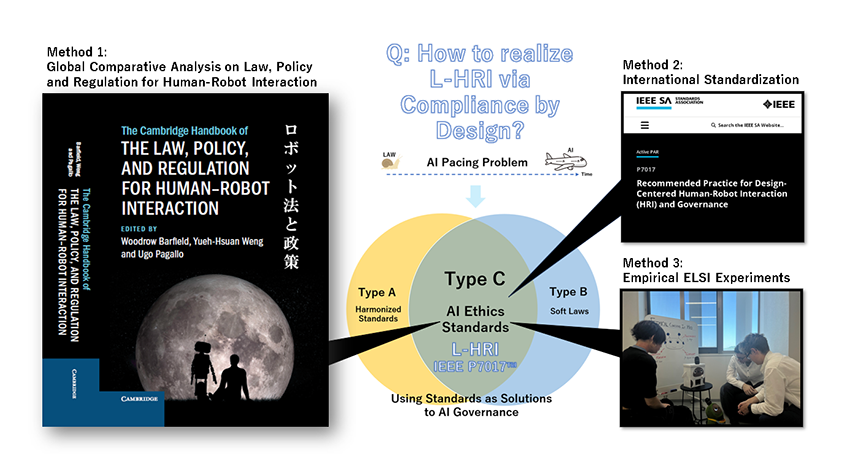
図:ロボットの倫理設計と標準化のための3つの方法論
本成果は2024年11月21日にケンブリッジ大学出版局のThe Cambridge Handbook of the Law, Policy, and Regulation for Human-Robot Interactionに収録されました。
論文情報:
タイトル:Ethical Design and Standardization for Robot Governance
著者:翁岳暄
掲載書籍:The Cambridge Handbook of the Law, Policy, and Regulation for Human-Robot Interaction, Woodrow Barfield, Yueh-Hsuan Weng, Ugo Pagallo (Eds.), Cambridge University Press
DOI:10.1017/9781009386708
ISBN:9781009386708
URL:https://www.cambridge.org/core/books/cambridge-handbook-of-the-law-policy-and-regulation-for-humanrobot-interaction/5740D8AEA42968E6A195BEDF5CBD0E5C
タイトル:Ethical Design and Standardization for Robot Governance
著者:翁岳暄
掲載書籍:The Cambridge Handbook of the Law, Policy, and Regulation for Human-Robot Interaction, Woodrow Barfield, Yueh-Hsuan Weng, Ugo Pagallo (Eds.), Cambridge University Press
DOI:10.1017/9781009386708
ISBN:9781009386708
URL:https://www.cambridge.org/core/books/cambridge-handbook-of-the-law-policy-and-regulation-for-humanrobot-interaction/5740D8AEA42968E6A195BEDF5CBD0E5C